






Types of Constrained Motion: Definitions, Examples, and Uses
Constrained motion refers to the motion of a system where the movement of its components is restricted by one or more conditions called constraints. These constraints may limit the displacement, direction, or degrees of freedom of the bodies involved. Understanding constrained motion and its different types is essential in analysing mechanical systems, as such situations frequently arise in engineering mechanisms and JEE Main Physics problems.
Definition of Constrained Motion
Constrained motion is defined as the motion of a particle or a body that is restricted by constraints. These constraints can be in the form of geometric paths, surfaces, or physical connections, preventing the body from moving freely. The degree of movement allowed by the constraints is known as the degrees of freedom of the system.
In a completely free rigid body in three-dimensional space, there are six degrees of freedom: three translational and three rotational. Constraints reduce the number of possible independent displacements, thus limiting the motion of the system.
Types of Constrained Motion
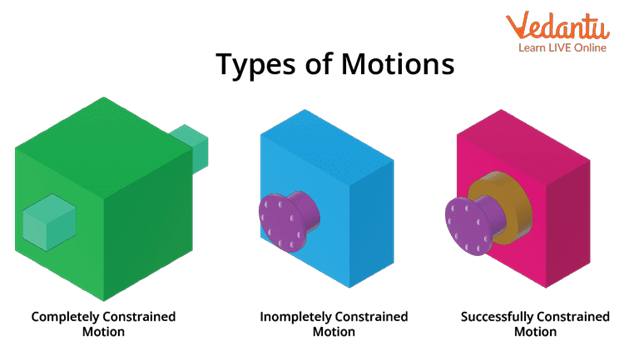
Constrained motions are classified based on how restrictions affect the relative movement of the bodies involved. The primary types are completely constrained motion, partially or successfully constrained motion, and incompletely constrained motion.
Completely Constrained Motion
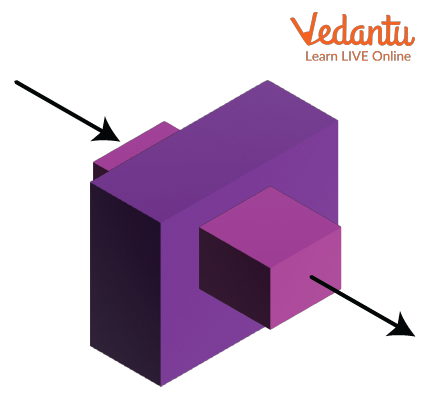
Completely constrained motion occurs when the relative motion between two bodies is restricted to only one definite direction, regardless of the direction of the applied force. This restriction ensures that movement is possible only along a single path or axis.
An example of completely constrained motion is a rectangular shaft moving within a rectangular hole; the shaft can only reciprocate along the axis of the hole. Another example is the reciprocating motion of the piston inside a cylinder in an engine, where the piston can only move back and forth.
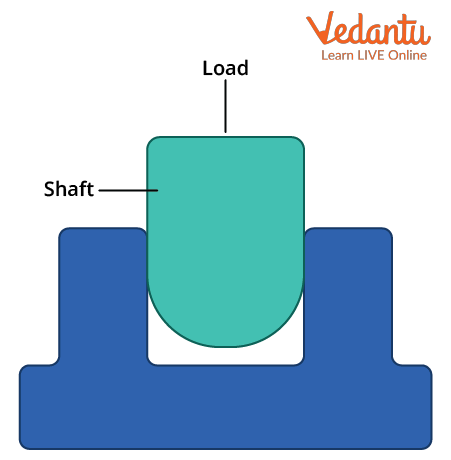
Partially or Successfully Constrained Motion
Partially or successfully constrained motion is observed when relative motion between two elements could occur in more than one direction without an external force, but is limited to a single direction when additional constraint forces are applied. Movement along the restricted direction takes place only if the specific conditions for the constraint are maintained.
A typical example is the vertical shaft in a footstep bearing. The shaft can move upward or rotate within the bearing. However, when a compressive load is applied, vertical movement is prevented, and only rotational motion remains possible, making the constraint successful under the load application.
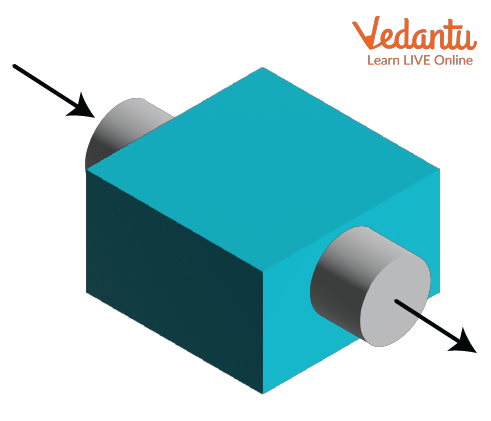
Incompletely Constrained Motion
Incompletely constrained motion allows relative motion between two elements in more than one direction, depending on the direction of the applied force. The constraint is insufficient to restrict the system to only one type of relative movement.
An example is a circular shaft placed inside a circular hole. The shaft can rotate or move axially, and these motions are independent of each other. Both movements are permitted by the constraint, and neither is restricted by the interaction between the shaft and the hole.
Examples of Constrained Motion
The following practical examples illustrate the classifications of constrained motion in mechanical systems frequently encountered in JEE Main questions.
- Completely constrained: Piston-cylinder arrangement in engines
- Successfully constrained: Shaft in a loaded footstep bearing
- Incompletely constrained: Circular rod in a round hole
Such classifications assist in analysing mechanisms, particularly when applying fundamental principles like Newton’s laws or work-energy theorems.
Mathematical Representation of Constraints
Constraints often generate mathematical relations between the variables describing a system’s motion. For example, a particle forced to move along a straight line must satisfy the equation $y = mx + c$ at all times.
General constraint equations for particles or rigid bodies can be written as $f(x, y, z, t) = 0$, relating position variables and possibly time. These equations reduce the independent variables and represent the degrees of freedom after accounting for constraints.
For concepts involving related quantities, refer to the Difference Between Mass And Weight article.
Constraint Forces and Their Role
Constraint forces are the forces exerted by the constraint that restrict the motion of particles or bodies. These include normal reactions, tension, or frictional forces that ensure the bodies follow their allowed path or movement type.
For example, the normal reaction in a groove keeps a bead sliding along a wire, or string tension keeps a mass moving in a circle. Constraint forces are directed so as to prevent motion that violates the constraint.
For more on how force relates to pressure in various systems, refer to Difference Between Force And Pressure.
Constrained Motion of Connected Particles
In many cases, particles are connected by rigid rods or strings. The motion of one particle is constrained by the connection to the other, leading to equations that relate their displacements, velocities, or accelerations.
For a system of two masses connected by a light inextensible string over a pulley, the displacement of one mass is equal and opposite to the displacement of the other. If $x_1$ and $x_2$ are their respective displacements, $x_1 + x_2 =$ constant, leading to $v_1 = -v_2$ and $a_1 = -a_2$.
Comparing the difference between two related quantities is essential in dynamics. Reference: Difference Between Speed And Velocity.
Applications of Constrained Motion in Physics
Constrained motion frequently appears in problems on pulleys, connected masses, rolling objects, and sliding on inclined planes. Correct identification of the type of constraint is crucial for setting up equations of motion.
- Rolling of a cylinder without slipping is a constrained motion
- Pulley systems require connecting string constraint relationships
Related concepts are discussed further in articles like Difference Between Distance And Displacement and Difference Between Static And Dynamic Friction.
Summary Table: Types of Constrained Motion
| Type of Constrained Motion | Key Characteristic |
|---|---|
| Completely Constrained | Allows only one relative motion direction |
| Partially/Successfully Constrained | Single direction possible under conditions |
| Incompletely Constrained | Multiple independent relative motions allowed |
Dimensional analysis aids in identifying physical quantities within constraint equations. For further learning, refer to Dimensions Of Force.









FAQs on What Is Constrained Motion? Types and Examples for Students
1. What is constrained motion?
Constrained motion is a type of mechanical motion in which the movement of a body or system is limited or restricted by external forces, surfaces, or connections.
Examples of constrained motion include:
- Movement of a train along tracks (guides restrict direction)
- Sliding of a piston in a cylinder (piston follows the cylinder path)
- Motion of a pendulum (restricted by the length of the string)
2. What are the types of constrained motion?
Types of constrained motion describe the different ways in which a body's movement is limited by constraints. The main types are:
- Completely constrained motion: Motion is restricted to only one definite direction (e.g. piston in a cylinder).
- Incompletely constrained motion: Body can move in more than one direction, depending on the external force (e.g. a square bar moving in a square hole).
- Successfully constrained motion: Motion is normally incomplete but can be made complete by applying a specific force (e.g. valve in a petrol engine held in place by a spring).
3. What is a completely constrained motion? Give an example.
A completely constrained motion is when a body can move only in one specific direction, no matter how external forces act.
Example:
- The motion of a piston inside a cylinder
4. Differentiate between completely constrained and successfully constrained motion.
Completely constrained motion always restricts a body to a single path, regardless of the applied force. Successfully constrained motion is normally not entirely restricted, but an additional force ensures constrained movement.
Differences:
- Completely constrained: Path is fixed by geometry alone (e.g., piston in cylinder).
- Successfully constrained: Extra force (like a spring) keeps motion along one path.
5. What is an incompletely constrained motion? Give one example.
An incompletely constrained motion allows a body to move in more than one direction depending on the force applied.
Example:
- A circular rod in a round hole can both slide and rotate.
6. Why is constrained motion important in engineering and machines?
Constrained motion is crucial in engineering and machines because it enables precise movement control, ensuring mechanisms operate in desired ways.
Main reasons include:
- Ensures safety of moving parts
- Helps achieve predictable, repeatable actions
- Enables mechanical design and linkage systems (e.g. engines, levers)
- Prevents unwanted or damaging motions
7. Explain with an example: What is successfully constrained motion?
A successfully constrained motion is when movement is restricted in one direction only because of an applied external force or device.
Example:
- The valve of a steam engine is kept seated by a spring. Without the spring, the valve could move away from its seat along two directions, but the spring's force restricts its movement, achieving successful constraint.
8. Give examples of systems that display constrained motion in daily life.
Several everyday systems involve constrained motion. Common examples include:
- Door hinges (rotation in one plane only)
- Scissors (opening and closing in a fixed arc)
- Elevator movement (vertical, guided by rails)
- Railway train moving on tracks (restricted to follow the rails)
- Drawer sliding in a table
9. How does a piston in a cylinder show constrained motion?
The piston in a cylinder is a classic example of completely constrained motion, as the piston can only move forward or backward (reciprocating motion) along the cylinder axis.
- Sideways or rotational motion is prevented by the shape of the cylinder
- This type of constraint is widely used in engines and pumps
10. What are the advantages of using constrained motion in machines?
Advantages of constrained motion in machines include:
- Improved accuracy and repeatability of motion
- Enhanced efficiency by removing unwanted movements
- Safety of mechanical components
- Reliable functioning of mechanisms like gears, cams, linkages, and engines
- Better control and predictability of system behaviour
11. Define constraint and give its classification.
Constraint is any restriction or limitation placed on the movement of a body.
Classification:
- Completely constrained motion
- Incompletely constrained motion
- Successfully constrained motion
12. What is the difference between kinematic pair and constrained motion?
Kinematic pair refers to two machine elements that are in contact and move relative to each other in a specific way. Constrained motion is the restriction of movement in a system.
Key differences:
- Kinematic pair: Focuses on the type of relative motion (e.g., revolute, sliding)
- Constrained motion: Focuses on how movement is limited (e.g., by external force, geometry)