



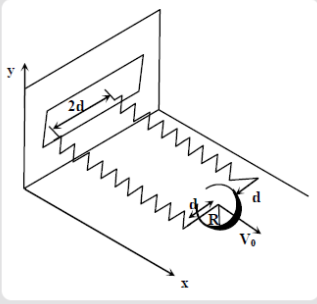
The net external force acting on the disk when its centre of mass is at displacement x with respect to its equilibrium position is
\[
{\mathbf{A}}.\;\;\;{\mathbf{kx}} \\
{\mathbf{B}}.\;\;\;\;{\mathbf{2}}{\text{ }}{\mathbf{kx}} \\
{\mathbf{C}}.\;\;\;\dfrac{{{\mathbf{2}}{\text{ }}{\mathbf{kx}}}}{{\mathbf{3}}} \\
{\mathbf{D}}.\;\;\;\;\dfrac{{{\mathbf{4}}{\text{ }}{\mathbf{kx}}}}{{\mathbf{3}}} \\
\]
Answer
596.7k+ views
Hint:
Net Force acting on a body is given by the formula:
\[{\vec F_{Net}} = m.\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {a} \]
Where,
\[{\vec F_{Net}}\] is the net force acting on the body
m is the mass of the body
\[\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {a} \] is the acceleration of the body
Moment of Force is called Torque.
Net Torque acting on a body is given by the formula,
\[{\vec \tau _{Net}} = I\vec \alpha \]
Where,
\[{\vec \tau _{Net}}\] is the net Torque acting on the body
I is the moment of inertia of the body
\[\vec \alpha \]is the angular acceleration of the body
Also,
\[{\vec \tau _{Net}} = \vec F \times R\]
Moment of inertia of a disk is given by the formula,
$I = \dfrac{1}{2}M{R^2}$
Using all the above formulas, we can easily compute the result.
Complete step by step solution: Net Force acting on a body is given by the formula:
\[{\vec F_{Net}} = m.\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {a} \]
Where,
\[{\vec F_{Net}}\] is the net force acting on the body
m is the mass of the body
\[\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {a} \] is the acceleration of the body
We will insert \[( - 2kx + F)\]in the place of \[{\vec F_{Net}}\]
\[ - 2kx + F = M{a_c}\] Equation 1
Where,
k is the spring constant
x is the distance by which the spring has been stretched
F is the friction force on the disk
M is the mass of disk
\[{a_c}\] is the acceleration of centre of mass of the disk
Net Torque acting on a body is given by the formula,
\[{\vec \tau _{Net}} = I\vec \alpha \] Equation 2
Where,
\[{\vec \tau _{Net}}\] is the net Torque acting on the body
I is the moment of inertia of the body
\[\vec \alpha \]is the angular acceleration of the body
Additionally, Torque is also calculated as follows,
\[{\vec \tau _{Net}} = \vec F \times R\] Equation 3
Where,
R is the distance of the Force from the centre of mass of the body
Now combining equations 2 and 3,
We get,
$\vec F \times R = I\vec \alpha $
$\vec F = \dfrac{{I\vec \alpha }}{R}$ Equation 4
In Pure Rolling condition,
\[{a_c} = {\vec \alpha _c}R\]
Moment of inertia of a disk is given by the formula,
$I = \dfrac{1}{2}M{R^2}$
Inserting the values of $\alpha $ and I in equation 4,
We get,
\[F = \dfrac{{\dfrac{1}{2}M{R^2}}}{R} \times \dfrac{{{a_c}}}{R}\]
$ = > F = \dfrac{1}{2}M{a_c}$
Inserting the value of F in equation 1,
We get,
$ = > - 2kx + \dfrac{1}{2}M{a_c} = - M{a_c}$
$ = > \dfrac{1}{2}M{a_c} + M{a_c} = 2kx$
$ = > \dfrac{3}{2}M{a_c} = 2kx$
$ = > M{a_c} = \dfrac{4}{3}kx$
$ = > M{a_c} = - \dfrac{4}{3}kx$
Hence, Option (D) is correct.
Note:
We have used a negative sign because the disk has been displaced away from the equilibrium position. Hence this force will tend to bring the disk back to its initial position.
\[{\vec F_{Net}} = m.\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {a} \]
Where,
\[{\vec F_{Net}}\] is the net force acting on the body
m is the mass of the body
\[\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {a} \] is the acceleration of the body
Moment of Force is called Torque.
Net Torque acting on a body is given by the formula,
\[{\vec \tau _{Net}} = I\vec \alpha \]
Where,
\[{\vec \tau _{Net}}\] is the net Torque acting on the body
I is the moment of inertia of the body
\[\vec \alpha \]is the angular acceleration of the body
Also,
\[{\vec \tau _{Net}} = \vec F \times R\]
Moment of inertia of a disk is given by the formula,
$I = \dfrac{1}{2}M{R^2}$
Using all the above formulas, we can easily compute the result.
Complete step by step solution: Net Force acting on a body is given by the formula:
\[{\vec F_{Net}} = m.\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {a} \]
Where,
\[{\vec F_{Net}}\] is the net force acting on the body
m is the mass of the body
\[\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {a} \] is the acceleration of the body
We will insert \[( - 2kx + F)\]in the place of \[{\vec F_{Net}}\]
\[ - 2kx + F = M{a_c}\] Equation 1
Where,
k is the spring constant
x is the distance by which the spring has been stretched
F is the friction force on the disk
M is the mass of disk
\[{a_c}\] is the acceleration of centre of mass of the disk
Net Torque acting on a body is given by the formula,
\[{\vec \tau _{Net}} = I\vec \alpha \] Equation 2
Where,
\[{\vec \tau _{Net}}\] is the net Torque acting on the body
I is the moment of inertia of the body
\[\vec \alpha \]is the angular acceleration of the body
Additionally, Torque is also calculated as follows,
\[{\vec \tau _{Net}} = \vec F \times R\] Equation 3
Where,
R is the distance of the Force from the centre of mass of the body
Now combining equations 2 and 3,
We get,
$\vec F \times R = I\vec \alpha $
$\vec F = \dfrac{{I\vec \alpha }}{R}$ Equation 4
In Pure Rolling condition,
\[{a_c} = {\vec \alpha _c}R\]
Moment of inertia of a disk is given by the formula,
$I = \dfrac{1}{2}M{R^2}$
Inserting the values of $\alpha $ and I in equation 4,
We get,
\[F = \dfrac{{\dfrac{1}{2}M{R^2}}}{R} \times \dfrac{{{a_c}}}{R}\]
$ = > F = \dfrac{1}{2}M{a_c}$
Inserting the value of F in equation 1,
We get,
$ = > - 2kx + \dfrac{1}{2}M{a_c} = - M{a_c}$
$ = > \dfrac{1}{2}M{a_c} + M{a_c} = 2kx$
$ = > \dfrac{3}{2}M{a_c} = 2kx$
$ = > M{a_c} = \dfrac{4}{3}kx$
$ = > M{a_c} = - \dfrac{4}{3}kx$
Hence, Option (D) is correct.
Note:
We have used a negative sign because the disk has been displaced away from the equilibrium position. Hence this force will tend to bring the disk back to its initial position.
Recently Updated Pages
Master Class 11 Computer Science: Engaging Questions & Answers for Success
Master Class 11 Business Studies: Engaging Questions & Answers for Success
Master Class 11 Economics: Engaging Questions & Answers for Success
Master Class 11 English: Engaging Questions & Answers for Success
Master Class 11 Maths: Engaging Questions & Answers for Success
Master Class 11 Biology: Engaging Questions & Answers for Success
Trending doubts
One Metric ton is equal to kg A 10000 B 1000 C 100 class 11 physics CBSE
There are 720 permutations of the digits 1 2 3 4 5 class 11 maths CBSE
Discuss the various forms of bacteria class 11 biology CBSE
Draw a diagram of a plant cell and label at least eight class 11 biology CBSE
State the laws of reflection of light
Explain zero factorial class 11 maths CBSE