



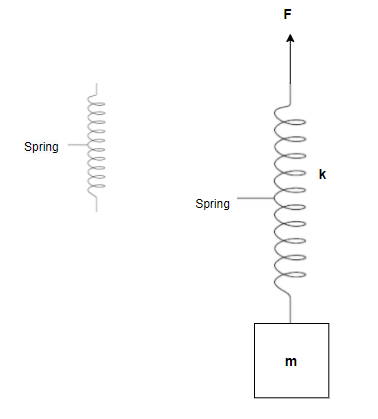
A block of mass m is connected to a spring (spring constant k). Initially the block is at rest and the spring is in its natural length. Now the system is released in gravitational field and a variable force F is applied on the upper end of the spring such that the downward acceleration of the block is given as a=g−αt, where t is time elapses and α=1m/s3, the velocity of the point of application of the force is
(A) \[\dfrac{m}{k} - gt + \dfrac{{\mathop t\nolimits^2 }}{2}\]
(B) \[\dfrac{m}{k} + gt + \dfrac{{\mathop t\nolimits^2 }}{2}\]
(C) \[\dfrac{m}{k} - gt - \dfrac{{\mathop t\nolimits^2 }}{2}\]
(D) \[\dfrac{m}{k} - gt - \mathop t\nolimits^2 \]
Answer
582.9k+ views
Hint:-The given problem can be solved by taking the consideration of phenomena of a spring and a mass attached to it. When a mass is attached to it then there are forces working on the mass and this problem can be solved by taking the consideration of these masses.
Complete step-by-step solution:
Step 1: As it is given in the problem the force that is working on the upper end of the spring is variable force and the acceleration by which the block of mass m is moving downwards is \[a = g - \alpha t\], where t is the time of elapse and \[\alpha = 1\]m/s2.
Let the original length of the spring at rest is \[\mathop l\nolimits_0 \] and after the block of mass m is attached to the spring then it’s length is \[l\].
So, the elongation in length of the spring (let say \[x\]) then \[x = l - \mathop l\nolimits_0 \] at a time t.
This \[x\] can be defined as the total elongation due to the body, m (say) \[\mathop x\nolimits_b \], and due to force, F (say) \[\mathop x\nolimits_f \].
So, \[x = \mathop x\nolimits_b + \mathop x\nolimits_f \] …………………….. (1)
Now considering the body, the force equation will be
\[mg - kx = ma\]
Where \[mg = \]weight, \[kx = \]spring force, and \[ma = \]force due to acceleration on mass
And \[a = g - \alpha t\] …………………………. (2)
On solving the equation (1) and keeping the value from equation (2), we will get –
\[mg - kx = m\left( {g - \alpha t} \right)\] on solving this equation
\[\Rightarrow - kx = - m\alpha t\]
\[\Rightarrow x = \dfrac{{m\alpha t}}{k}\] ……………. (3)
Step 2: To get the velocity, we can differentiate the equation (3), we will get –
\[\Rightarrow \dfrac{{dx}}{{dt}} = \dfrac{{m\alpha }}{k}\dfrac{{dt}}{{dt}}\]
\[\Rightarrow \dfrac{{dx}}{{dt}} = \dfrac{{m\alpha }}{k}\]
But we know that from equation (1), we will get –
\[\Rightarrow \dfrac{{d\left( {\mathop x\nolimits_b + \mathop x\nolimits_f } \right)}}{{dt}} = \dfrac{{m\alpha }}{k}\]
\[\Rightarrow \mathop v\nolimits_b + \mathop v\nolimits_f = \dfrac{{m\alpha }}{k}\] ……………….(4)
Where \[\mathop v\nolimits_b \] and \[\mathop v\nolimits_f \] are the velocities of block of mass m and the point of application of force respectively.
Step 3: But we also know that –
\[a = g - \alpha t\]
And \[\dfrac{{d\mathop v\nolimits_b }}{{dt}} = g - \alpha t\] on further solving this equation
\[\Rightarrow d\mathop v\nolimits_b = (g - \alpha t)dt\]
On, integrating the above equation –
\[\Rightarrow \int {d\mathop v\nolimits_b = \int {(g - \alpha t)dt} } \] on further solving this equation –
\[\Rightarrow \mathop v\nolimits_b = gt - \dfrac{{\alpha \mathop t\nolimits^2 }}{2}\] ……………………….(5)
So from equation (4) and (5)
\[\Rightarrow gt - \dfrac{{\alpha \mathop t\nolimits^2 }}{2} + \mathop v\nolimits_f = \dfrac{{m\alpha }}{k}\]
\[\Rightarrow \mathop v\nolimits_f = \dfrac{{m\alpha }}{k} - gt + \dfrac{{\alpha \mathop t\nolimits^2 }}{2}\] where \[\alpha = 1\]m/s2
So, \[\Rightarrow \mathop v\nolimits_f = \dfrac{m}{k} - gt + \dfrac{{\mathop t\nolimits^2 }}{2}\]
So, the correct option is (A).
Note:- When the spring is compressed or elongated, it tends to recover its original length, on account of elasticity. The force trying to bring the spring back to its original configuration is called restoring force or spring force.
Complete step-by-step solution:
Step 1: As it is given in the problem the force that is working on the upper end of the spring is variable force and the acceleration by which the block of mass m is moving downwards is \[a = g - \alpha t\], where t is the time of elapse and \[\alpha = 1\]m/s2.
Let the original length of the spring at rest is \[\mathop l\nolimits_0 \] and after the block of mass m is attached to the spring then it’s length is \[l\].
So, the elongation in length of the spring (let say \[x\]) then \[x = l - \mathop l\nolimits_0 \] at a time t.
This \[x\] can be defined as the total elongation due to the body, m (say) \[\mathop x\nolimits_b \], and due to force, F (say) \[\mathop x\nolimits_f \].
So, \[x = \mathop x\nolimits_b + \mathop x\nolimits_f \] …………………….. (1)
Now considering the body, the force equation will be
\[mg - kx = ma\]
Where \[mg = \]weight, \[kx = \]spring force, and \[ma = \]force due to acceleration on mass
And \[a = g - \alpha t\] …………………………. (2)
On solving the equation (1) and keeping the value from equation (2), we will get –
\[mg - kx = m\left( {g - \alpha t} \right)\] on solving this equation
\[\Rightarrow - kx = - m\alpha t\]
\[\Rightarrow x = \dfrac{{m\alpha t}}{k}\] ……………. (3)
Step 2: To get the velocity, we can differentiate the equation (3), we will get –
\[\Rightarrow \dfrac{{dx}}{{dt}} = \dfrac{{m\alpha }}{k}\dfrac{{dt}}{{dt}}\]
\[\Rightarrow \dfrac{{dx}}{{dt}} = \dfrac{{m\alpha }}{k}\]
But we know that from equation (1), we will get –
\[\Rightarrow \dfrac{{d\left( {\mathop x\nolimits_b + \mathop x\nolimits_f } \right)}}{{dt}} = \dfrac{{m\alpha }}{k}\]
\[\Rightarrow \mathop v\nolimits_b + \mathop v\nolimits_f = \dfrac{{m\alpha }}{k}\] ……………….(4)
Where \[\mathop v\nolimits_b \] and \[\mathop v\nolimits_f \] are the velocities of block of mass m and the point of application of force respectively.
Step 3: But we also know that –
\[a = g - \alpha t\]
And \[\dfrac{{d\mathop v\nolimits_b }}{{dt}} = g - \alpha t\] on further solving this equation
\[\Rightarrow d\mathop v\nolimits_b = (g - \alpha t)dt\]
On, integrating the above equation –
\[\Rightarrow \int {d\mathop v\nolimits_b = \int {(g - \alpha t)dt} } \] on further solving this equation –
\[\Rightarrow \mathop v\nolimits_b = gt - \dfrac{{\alpha \mathop t\nolimits^2 }}{2}\] ……………………….(5)
So from equation (4) and (5)
\[\Rightarrow gt - \dfrac{{\alpha \mathop t\nolimits^2 }}{2} + \mathop v\nolimits_f = \dfrac{{m\alpha }}{k}\]
\[\Rightarrow \mathop v\nolimits_f = \dfrac{{m\alpha }}{k} - gt + \dfrac{{\alpha \mathop t\nolimits^2 }}{2}\] where \[\alpha = 1\]m/s2
So, \[\Rightarrow \mathop v\nolimits_f = \dfrac{m}{k} - gt + \dfrac{{\mathop t\nolimits^2 }}{2}\]
So, the correct option is (A).
Note:- When the spring is compressed or elongated, it tends to recover its original length, on account of elasticity. The force trying to bring the spring back to its original configuration is called restoring force or spring force.
Recently Updated Pages
Master Class 12 Economics: Engaging Questions & Answers for Success
Master Class 12 Physics: Engaging Questions & Answers for Success
Master Class 12 English: Engaging Questions & Answers for Success
Master Class 12 Social Science: Engaging Questions & Answers for Success
Master Class 12 Maths: Engaging Questions & Answers for Success
Master Class 12 Business Studies: Engaging Questions & Answers for Success
Trending doubts
Which are the Top 10 Largest Countries of the World?
What are the major means of transport Explain each class 12 social science CBSE
Draw a labelled sketch of the human eye class 12 physics CBSE
Why cannot DNA pass through cell membranes class 12 biology CBSE
Differentiate between insitu conservation and exsitu class 12 biology CBSE
Draw a neat and well labeled diagram of TS of ovary class 12 biology CBSE