



The distance of point of a compound pendulum from its center of gravity is ${\text{ l, }}$ the time period of oscillation relative to this point is ${\text{ T}}{\text{. }}$ If ${\text{ g = }}{\pi ^2},{\text{ }}$ the relation between ${\text{ l }}$ and ${\text{ T }}$ will be:
A) ${l^2} - \left[ {\dfrac{{{T^2}}}{4}} \right]l + {k^2} = 0$
B) ${l^2} + \left[ {\dfrac{{{T^2}}}{4}} \right]l + {k^2} = 0$
C) ${l^2} - \left[ {\dfrac{{{T^2}}}{4}} \right]l - {k^2} = 0$
D) ${l^2} + \left[ {\dfrac{{{T^2}}}{4}} \right]l - {k^2} = 0$
Answer
233.1k+ views
Hint: A rigid body capable of oscillating about a horizontal axis passing through the pendulum is called a compound pendulum. If the pendulum rotates about a fixed point the distance between that fixed point and the center of gravity is the length of the pendulum. In this question, we have to find the relation between the length and the time period of oscillation.
Formula used:
$\tau = I\alpha $
Where, ${\text{ }}\tau {\text{ }}$is the torque of the pendulum, ${\text{ I }}$ is the moment of inertia of the pendulum and ${\text{ }}\alpha {\text{ }}$stands for the angular acceleration of the pendulum
$T = \dfrac{{2\pi }}{\omega }$
Where, ${\text{ T }}$ stands for the time period of the pendulum, ${\text{ }}\omega {\text{ }}$ stands for the angular velocity of the pendulum and ${\text{ 2}}\pi {\text{ }}$ is a constant
$\alpha = {\omega ^2}x$
Where ${\text{ }}\alpha {\text{ }}$ stands for angular acceleration, ${\text{ }}\omega {\text{ }}$ stands for angular velocity and ${\text{ x }}$stands for the displacement of the pendulum.
Complete step by step solution:
Consider the compound pendulum as shown in the figure:
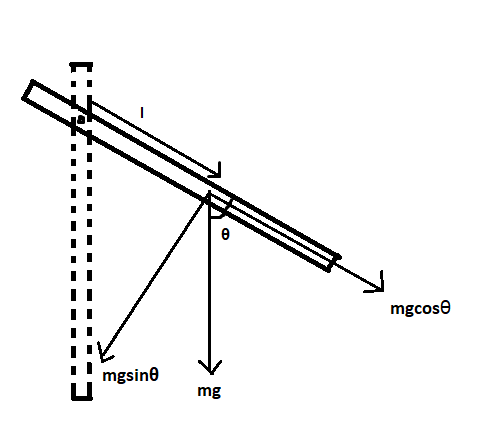
The weight${\text{ mg }}$is resolved into two components ${\text{ mg sin}}\theta $and${\text{ mg cos}}\theta {\text{ }}$.
The torque of the pendulum \[{\text{ }}\tau = mgl\sin \theta \]
When${\text{ }}\theta \to 0 \Rightarrow \sin \theta \approx \theta $
This implies
${\text{ }}\tau = mgl\theta $
We know that the torque,
${\text{ }}\tau {\text{ = I}}\alpha $
The length of the pendulum is${\text{ l }}$and the radius of gyration is given by${\text{ k }}$then the moment of Inertia ${\text{ }}\left( I \right){\text{ }}$of the pendulum is given by,
$I = m{k^2} + m{l^2}$
From equations and, we get
$\tau = mgl\theta = I\alpha $
From this equation we get
$\alpha = \dfrac{{mgl\theta }}{I}$ Substituting in equation
$\alpha = \dfrac{{mgl\theta }}{{m{k^2} + m{l^2}}} = \dfrac{{mgl\theta }}{{m({k^2} + {l^2})}} = \dfrac{{gl\theta }}{{({k^2} + {l^2})}}$
We know that the angular acceleration is also given by${\text{ }}\alpha = {\omega ^2}x$
Here the displacement${\text{ x }}$is the angular displacement${\text{ }}\theta {\text{ }}$
Therefore, the angular acceleration is,
$\alpha = {\omega ^2}\theta $
Equating and we get
${\omega ^2} = \dfrac{{gl}}{{({k^2} + {l^2})}}$
$\omega = \sqrt {\dfrac{{gl}}{{({l^2} + {k^2})}}} $
The time period of the pendulum is given by,
$T = \dfrac{{2\pi }}{\omega }$
Substituting the value of${\text{ }}\omega {\text{ }}$in, we get
$T = 2\pi \sqrt {\dfrac{{{l^2} + {k^2}}}{{gl}}} {\text{ }}$
It is given that,${\text{ g = }}{\pi ^2}$
Substituting this value we get
$T = 2\pi \sqrt {\dfrac{{{l^2} + {k^2}}}{{{\pi ^2}l}}} = 2\sqrt {\dfrac{{{l^2} + {k^2}}}{l}} $
Squaring both sides we get
${T^2} = 4\dfrac{{{l^2} + {k^2}}}{l}$
Rearranging the equation we get,
$ \dfrac{{{T^2}}}{4} = \dfrac{{{l^2} + {k^2}}}{l} $
$\left( {\dfrac{{{T^2}}}{4}} \right)l = {l^2} + {k^2} $
${l^2} - \left( {\dfrac{{{T^2}}}{4}} \right)l - {k^2} = 0 $
Therefore, The answer is Option (C) : ${l^2} - \left[ {\dfrac{{{T^2}}}{4}} \right]l - {k^2} = 0.$
Note: The radius of gyration of a body about an axis is defined as the radial distance to a point that would have a moment of inertia same as the distribution of mass of the body. The major difference between a simple pendulum and a compound pendulum is that in a simple pendulum the length of the pendulum i.e. the distance between the center of mass and the fixed point about which the pendulum is oscillating will be larger compared to that of a compound pendulum.
Formula used:
$\tau = I\alpha $
Where, ${\text{ }}\tau {\text{ }}$is the torque of the pendulum, ${\text{ I }}$ is the moment of inertia of the pendulum and ${\text{ }}\alpha {\text{ }}$stands for the angular acceleration of the pendulum
$T = \dfrac{{2\pi }}{\omega }$
Where, ${\text{ T }}$ stands for the time period of the pendulum, ${\text{ }}\omega {\text{ }}$ stands for the angular velocity of the pendulum and ${\text{ 2}}\pi {\text{ }}$ is a constant
$\alpha = {\omega ^2}x$
Where ${\text{ }}\alpha {\text{ }}$ stands for angular acceleration, ${\text{ }}\omega {\text{ }}$ stands for angular velocity and ${\text{ x }}$stands for the displacement of the pendulum.
Complete step by step solution:
Consider the compound pendulum as shown in the figure:
The weight${\text{ mg }}$is resolved into two components ${\text{ mg sin}}\theta $and${\text{ mg cos}}\theta {\text{ }}$.
The torque of the pendulum \[{\text{ }}\tau = mgl\sin \theta \]
When${\text{ }}\theta \to 0 \Rightarrow \sin \theta \approx \theta $
This implies
${\text{ }}\tau = mgl\theta $
We know that the torque,
${\text{ }}\tau {\text{ = I}}\alpha $
The length of the pendulum is${\text{ l }}$and the radius of gyration is given by${\text{ k }}$then the moment of Inertia ${\text{ }}\left( I \right){\text{ }}$of the pendulum is given by,
$I = m{k^2} + m{l^2}$
From equations and, we get
$\tau = mgl\theta = I\alpha $
From this equation we get
$\alpha = \dfrac{{mgl\theta }}{I}$ Substituting in equation
$\alpha = \dfrac{{mgl\theta }}{{m{k^2} + m{l^2}}} = \dfrac{{mgl\theta }}{{m({k^2} + {l^2})}} = \dfrac{{gl\theta }}{{({k^2} + {l^2})}}$
We know that the angular acceleration is also given by${\text{ }}\alpha = {\omega ^2}x$
Here the displacement${\text{ x }}$is the angular displacement${\text{ }}\theta {\text{ }}$
Therefore, the angular acceleration is,
$\alpha = {\omega ^2}\theta $
Equating and we get
${\omega ^2} = \dfrac{{gl}}{{({k^2} + {l^2})}}$
$\omega = \sqrt {\dfrac{{gl}}{{({l^2} + {k^2})}}} $
The time period of the pendulum is given by,
$T = \dfrac{{2\pi }}{\omega }$
Substituting the value of${\text{ }}\omega {\text{ }}$in, we get
$T = 2\pi \sqrt {\dfrac{{{l^2} + {k^2}}}{{gl}}} {\text{ }}$
It is given that,${\text{ g = }}{\pi ^2}$
Substituting this value we get
$T = 2\pi \sqrt {\dfrac{{{l^2} + {k^2}}}{{{\pi ^2}l}}} = 2\sqrt {\dfrac{{{l^2} + {k^2}}}{l}} $
Squaring both sides we get
${T^2} = 4\dfrac{{{l^2} + {k^2}}}{l}$
Rearranging the equation we get,
$ \dfrac{{{T^2}}}{4} = \dfrac{{{l^2} + {k^2}}}{l} $
$\left( {\dfrac{{{T^2}}}{4}} \right)l = {l^2} + {k^2} $
${l^2} - \left( {\dfrac{{{T^2}}}{4}} \right)l - {k^2} = 0 $
Therefore, The answer is Option (C) : ${l^2} - \left[ {\dfrac{{{T^2}}}{4}} \right]l - {k^2} = 0.$
Note: The radius of gyration of a body about an axis is defined as the radial distance to a point that would have a moment of inertia same as the distribution of mass of the body. The major difference between a simple pendulum and a compound pendulum is that in a simple pendulum the length of the pendulum i.e. the distance between the center of mass and the fixed point about which the pendulum is oscillating will be larger compared to that of a compound pendulum.
Recently Updated Pages
JEE Main 2023 April 6 Shift 1 Question Paper with Answer Key
JEE Main 2023 April 6 Shift 2 Question Paper with Answer Key
JEE Main 2023 (January 31 Evening Shift) Question Paper with Solutions [PDF]
JEE Main 2023 January 30 Shift 2 Question Paper with Answer Key
JEE Main 2023 January 25 Shift 1 Question Paper with Answer Key
JEE Main 2023 January 24 Shift 2 Question Paper with Answer Key
Trending doubts
JEE Main 2026: Session 2 Registration Open, City Intimation Slip, Exam Dates, Syllabus & Eligibility
JEE Main 2026 Application Login: Direct Link, Registration, Form Fill, and Steps
Understanding the Angle of Deviation in a Prism
Hybridisation in Chemistry – Concept, Types & Applications
How to Convert a Galvanometer into an Ammeter or Voltmeter
Understanding Uniform Acceleration in Physics
Other Pages
JEE Advanced Marks vs Ranks 2025: Understanding Category-wise Qualifying Marks and Previous Year Cut-offs
Laws of Motion Class 11 Physics Chapter 4 CBSE Notes - 2025-26
Waves Class 11 Physics Chapter 14 CBSE Notes - 2025-26
Mechanical Properties of Fluids Class 11 Physics Chapter 9 CBSE Notes - 2025-26
Thermodynamics Class 11 Physics Chapter 11 CBSE Notes - 2025-26
Units And Measurements Class 11 Physics Chapter 1 CBSE Notes - 2025-26