





Physics Notes for Chapter 3 Motion In A Plane Class 11 - FREE PDF Download
1. Scalars and Vectors:
Some quantities can be described by a unique number. For example, mass, time, distance and speed can be described using a single number. These are called scalar quantities.
To express to someone how to get to a location from some other location, one piece of information is not enough. To describe this fully, both distance and displacement are required.
Quantities that require both magnitude and direction to describe a situation fully are known as vectors. For example, displacement and velocity are vectors.
The vectors are denoted by putting an arrow over the symbols representing them.
For example, the AB vector can be represented by $\overrightarrow{AB}$.
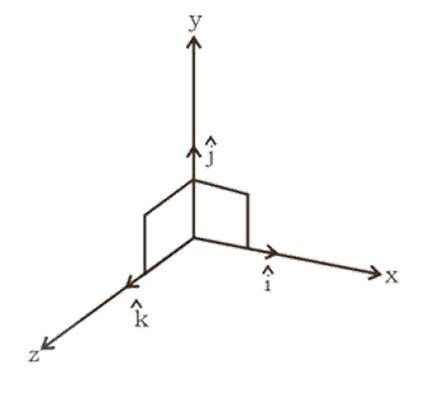
1.1 Unit Vector:
A unit vector has a magnitude of one and hence, it actually gives just the direction of the vector.
A unit vector can be determined by dividing the original vector by its magnitude
$\Rightarrow \hat{a}=\frac{{\vec{a}}}{\left| {\vec{a}} \right|}$
Unit vectors along different coordinate axis are as shown below:
1.2 Addition, subtraction and scalar multiplication of vectors:
Consider two vectors as follows:
\[{{\vec{r}}_{1}}={{a}_{1}}\hat{i}+{{b}_{1}}\hat{j}\]
\[{{\vec{r}}_{2}}={{a}_{2}}\hat{i}+{{b}_{2}}\hat{j}\]
Then,
\[{{\vec{r}}_{1}}+{{\vec{r}}_{2}}=\left( {{a}_{1}}+{{a}_{2}} \right)\hat{i}+\left( {{b}_{1}}+{{b}_{2}} \right)\hat{j}\]
\[{{\vec{r}}_{1}}-{{\vec{r}}_{2}}=\left( {{a}_{1}}-{{a}_{2}} \right)\hat{i}+\left( {{b}_{1}}-{{b}_{2}} \right)\hat{j}\]
Multiplication of a vector by scalar quantity:
\[c{{\vec{r}}_{1}}=c\left( {{a}_{1}}\hat{i}+{{b}_{1}}\hat{j} \right)=c{{a}_{1}}\hat{i}+c{{b}_{1}}\hat{j}\]
Representation of ${{\vec{r}}_{1}}$ on the coordinate axis:
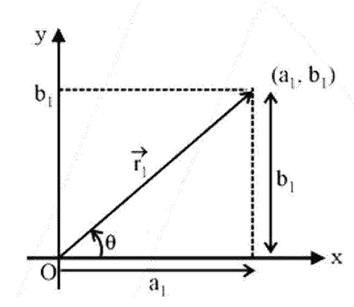
Magnitude and direction of ${{\vec{r}}_{1}}$:
Magnitude of ${{\vec{r}}_{1}}\left( \left| {{{\vec{r}}}_{1}} \right| \right)=\sqrt{{{a}_{1}}^{2}+{{b}_{1}}^{2}}$
Direction of ${{\vec{r}}_{1}}$ is given by
$\tan \theta =\frac{{{b}_{1}}}{{{a}_{1}}}=\frac{component\text{ }y-axis}{component\text{ }along\text{ }x-axis}$
$\Rightarrow \theta ={{\tan }^{-1}}\left( \frac{{{b}_{1}}}{{{a}_{1}}} \right)$
1.3 Parallel vectors:
Two vectors are said to be parallel vectors if and only if they have the same direction. When any vector is multiplied by a scalar, a vector parallel to the original vector is obtained.
If $b=ka$, then b and a are parallel vectors. Generally, to find if two vectors are parallel or not, we should find their unit vectors.
1.4 Equality of vectors:
Two vectors (representing two values of the same physical quantity) are referred to as equal if their corresponding magnitudes and directions are the same.
For example, $\left( 3i+4j \right)m\,\,and\,\,\left( 3i+4j \right)\frac{m}{s}$ cannot be compared as they represent two different physical quantities.
1.5 Addition of vectors:
When two or more vectors are added, the answer is referred to as the resultant. The resultant of two vectors is equivalent to the first vector followed immediately by the second vector.
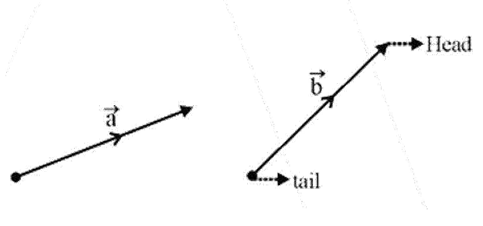
To determine the resultant of vectors a and b, the tail of vector b should be joined to the head of vector a. The resultant a+b is nothing but the direct vector from the tail of vector a to the head of vector b as shown below.
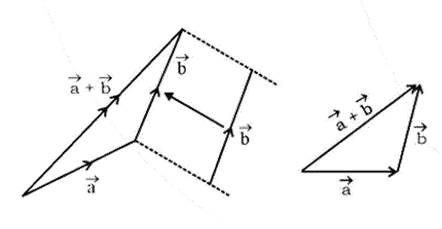
This is known as the triangle rule of vector addition. Another way to obtain the resultant vector is the parallelogram rule of vector addition. Here, we draw vectors \[\vec{a}\] and \[\vec{b}\], with both the tails coinciding. Taking these two as adjacent sides of a parallelogram, we complete the parallelogram. Now, the diagonal through the common tails gives the sum of two vectors.

Finding the magnitude of \[\vec{a}+\vec{b}\] and its direction:
\[{{\left| AD \right|}^{2}}=A{{E}^{2}}+E{{D}^{2}}\text{ }\]
Here,
$AE=\left| {\vec{a}} \right|+\left| b\,\cos \,\theta \right|$
$ED=b\,\sin \,\theta $
$\Rightarrow A{{D}^{2}}={{a}^{2}}+{{b}^{2}}{{\cos }^{2}}\theta +2ab\cos \theta +{{b}^{2}}{{\sin }^{2}}\theta $
$\Rightarrow A{{D}^{2}}={{a}^{2}}+{{b}^{2}}+2ab\cos \theta $
$\Rightarrow AD=\sqrt{{{a}^{2}}+{{b}^{2}}+2ab\cos \theta }$
where,
$\theta $is the angle contained between \[\vec{a}\] and \[\vec{b}\];
Also,
$\tan \alpha =\frac{ED}{AE}=\frac{b\,\sin \theta }{a+b\cos \theta }$
where,
$\alpha $ is the angle that the resultant makes with the positive x-axis.
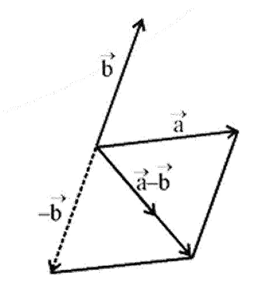
Subtraction of vectors:
Let \[\vec{a}\] and \[\vec{b}\] be two vectors. We define \[\vec{a}-\vec{b}\] as the sum of vectors $\vec{a}$ and the vector$(-\vec{b})$.
$\Rightarrow \vec{a}-\vec{b}=\vec{a}+(-\vec{b})$
Zero vector:
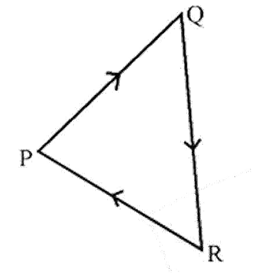
In the given triangle, \[\overrightarrow{PQ}+\overrightarrow{QR}+\overrightarrow{PR}\] should be equal to zero as the overall journey results in a return to the starting point.
\[\Rightarrow \overrightarrow{PQ}+\overrightarrow{QR}+\overrightarrow{PR}=0\]
Here are some other resultants:

Here, $\vec{a}+\vec{b}+\vec{c}+\vec{d}+\vec{e}=0\Rightarrow \vec{e}=-(\vec{a}+\vec{b}+\vec{c}+\vec{d})$

Here, $\vec{a}+\vec{b}+\vec{c}=0$
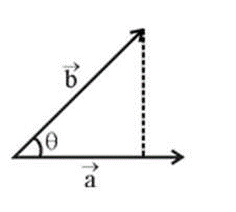
Resolution of vectors:

Consider the given diagram above.
Here,
\[\overrightarrow{OA}=\vec{a}\]
By vector addition rule,
\[\overrightarrow{OA}=\overrightarrow{OB}+\overrightarrow{OC}\]
$\left| \overrightarrow{OB} \right|=a\cos \,\theta $
$\left| \overrightarrow{OC} \right|=a\,\sin \theta $
If $\hat{i}$ and $\hat{j}$ denote vectors of unit magnitude along OX and along OY respectively, we get
$\overrightarrow{OB}=a\,\cos \theta \,\hat{i}$
$\overrightarrow{OC}=a\,\sin \theta \,\hat{j}$
$\Rightarrow \vec{a}=\left( a\,\cos \theta \right)\hat{i}+\left( a\,\sin \theta \right)\hat{j}$

1.6 Dot product or scalar product of two vectors:
Dot product of vectors $\vec{a}$ and $\vec{b}$ is given by
$\vec{a}.\vec{b}=\left| {\vec{a}} \right|\left| {\vec{b}} \right|\,\cos \theta $
If $\theta =0;$
$\Rightarrow \vec{a}.\vec{b}=\left| {\vec{a}} \right|\left| {\vec{b}} \right|\,$
If $\theta ={{90}^{\circ }}$;
$\Rightarrow \vec{a}.\vec{b}=\left| {\vec{a}} \right|\left| {\vec{b}} \right|\,{{90}^{\circ }}=0$
The dot product of unit vectors is given by
$\hat{i}\cdot \hat{i}=\left| {\hat{i}} \right|\left| {\hat{i}} \right|\,\cos {{0}^{\circ }}={{i}^{2}}\times 1=1$
Similarly,
$\hat{j}\cdot \hat{j}=1$;
$\hat{k}\cdot \,\hat{k}=1$
Now,
$\hat{i}\cdot \hat{j}=\left| {\hat{i}} \right|\left| {\hat{j}} \right|\,\cos {{90}^{\circ }}=1\times 1\times 0=0$
Similarly,
$\hat{j}\cdot \hat{k}=0\,$;
$\hat{k}\cdot \hat{i}=0$
Dot products are commutative and distributive:
\[\vec{a}\cdot \vec{b}=\vec{b}\cdot \vec{a}\]
\[\vec{a}\cdot \left( \vec{b}+\vec{c} \right)=\vec{a}\cdot \vec{b}+\vec{a}\cdot \vec{c}\]
2. MOTION IN 2D (PLANE)
2.1 Position vector and Displacement:
The position vector $\vec{r}$ of a particle P, located in a plane with reference to the origin of on xy–the coordinate system is given by $\vec{r}=x\hat{i}+y\hat{j}$, as shown below.

Now, if the particle moves along the path as shown to a new position ${{P}_{1}}$ with the position vector ${{\vec{r}}_{1}}$;
${{\vec{r}}_{1}}={{x}_{1}}\hat{i}+{{y}_{1}}\hat{j}$
Change in the position of the particle is nothing but its displacement given by,
$\Delta \vec{r}={{\vec{r}}_{1}}-\vec{r}=\left( {{x}_{1}}\hat{i}+{{y}_{1}}\hat{j} \right)-\left( x\hat{i}+y\hat{j} \right)$
$\Rightarrow \Delta \vec{r}==\left( {{x}_{1}}-x \right)\hat{i}+\left( {{y}_{1}}-y \right)\hat{j}$
$\Delta \vec{r}==\Delta x\hat{i}+\Delta y\hat{j}$
From the figure, it can also be seen that
\[\vec{r}+\Delta \vec{r}={{\vec{r}}_{1}}\,\,\,\,\,\,\,or\,\,\,\,\,\Delta \vec{r}={{\vec{r}}_{1}}-\,\,\vec{r}\], which is nothing but the triangle law of vector addition.
2.2 Average velocity:
Average velocity is given by,
${{\vec{v}}_{avg}}=\frac{\Delta \vec{r}}{\Delta t}=\frac{\Delta x\hat{i}+\Delta y\hat{j}}{\Delta t}$
$\Rightarrow {{\vec{v}}_{avg}}={{v}_{x}}\hat{i}+{{v}_{y}}\hat{j}$
Note: The direction of the average velocity is the same as that of \[\Delta \vec{r}\].
2.3 Instantaneous velocity:
Instantaneous velocity is given by,
$\vec{v}=\underset{\Delta t\to 0}{\mathop{\lim }}\,\frac{\Delta v}{\Delta t}=\frac{d\vec{r}}{dt}$
$\Rightarrow \vec{v}={{v}_{x}}\hat{i}+{{v}_{y}}\hat{j}$
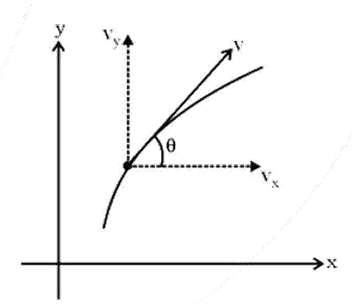
Here,
${{v}_{x}}=\frac{dx}{dt}\,\,and\,\,{{v}_{y}}=\frac{dy}{dt}$
$\Rightarrow \left| {\vec{v}} \right|=\sqrt{{{v}_{x}}^{2}+{{v}_{y}}^{2}}$
Also,
$\tan \theta =\frac{{{v}_{y}}}{{{v}_{x}}}$
$\Rightarrow \theta ={{\tan }^{-1}}\left( \frac{{{v}_{y}}}{{{v}_{x}}} \right)$
Note: The direction of instantaneous velocity at any point on the path of an object is the tangent to the path at that point and is in the direction of motion.
2.4 Average acceleration:
$\theta ={{\tan }^{-1}}\left( \frac{{{v}_{y}}}{{{v}_{x}}} \right)$Average acceleration is given by,
${{\vec{a}}_{avg}}=\frac{\Delta \vec{v}}{\Delta t}=\frac{\Delta {{v}_{x}}}{\Delta t}\hat{i}+\frac{\Delta {{v}_{y}}}{\Delta t}\hat{j}$
$\Rightarrow {{\vec{a}}_{avg}}={{a}_{x}}\hat{i}+{{a}_{y}}\hat{j}$
2.5 Instantaneous acceleration:
Instantaneous acceleration is given by,
\[\vec{a}=\frac{dv}{dt}=\frac{d{{v}_{x}}}{dt}\hat{i}+\frac{d{{v}_{y}}}{dt}\hat{j}\]
\[\Rightarrow \vec{a}={{a}_{x}}\hat{i}+{{a}_{y}}\hat{j}\]
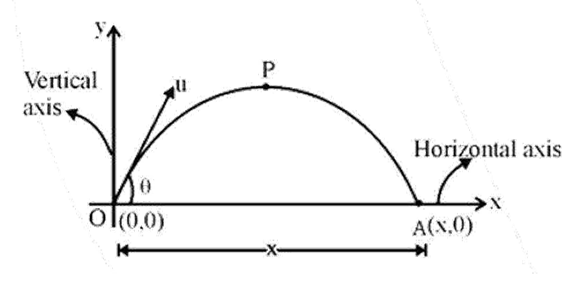
3. PROJECTILE MOTION:
When a particle is projected obliquely close to the surface of the earth, it moves simultaneously in horizontal and vertical directions. The motion of such a particle is referred to as projectile motion.
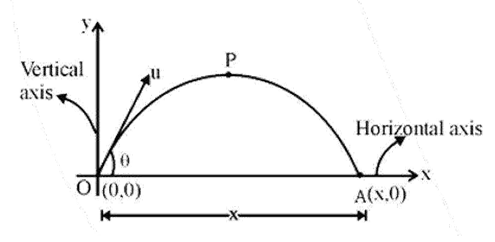
Here, a particle is projected at an angle with an initial velocity of ‘u’.
Considering the projectile motion given in the diagram above, let us calculate the following:
(a) time is taken to reach A from O
(b) horizontal distance covered (OA)
(c) the maximum height reached during the motion
(d) velocity at any time ‘t’ during the motion
Maximum Range:
$R=\frac{{{u}^{2}}\sin 2\theta }{g}\,\,and\,\,{{R}_{\max }}=\frac{{{u}^{2}}}{g}$
Range is maximum when $\sin 2\theta $ is maximum;
$\Rightarrow \max \left( \sin 2\theta \right)=1\,\text{ }or\text{ }\theta ={{45}^{\circ }}$
3.1 Analysis of velocity in the case of a projectile:
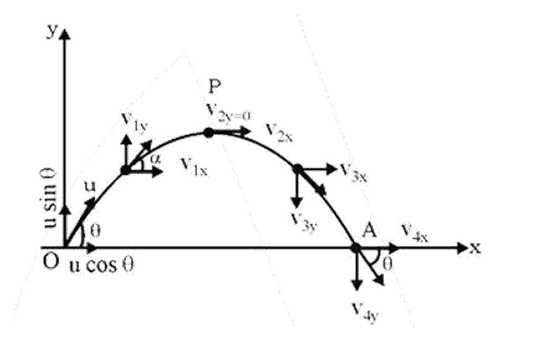
From the above equations;
i) ${{v}_{1x}}={{v}_{2x}}={{v}_{3x}}={{v}_{4x}}={{u}_{x}}=u\,\cos \theta $
which suggests that the velocity along the x-axis remains constant.
[as there is no external force acting along that direction]
ii)
a) The magnitude of velocity along the axis first decreases and then it increases after the topmost point.
b) At the topmost point, the magnitude of velocity is zero.
c) The direction of velocity is in the upward direction while ascending and is in the downward direction while descending.
d) The magnitude of velocity at A is the same as the magnitude of velocity at O; but the directions are opposite.
e) The angle which the net velocity makes with the horizontal can be evaluated by,
$\tan \alpha =\frac{{{v}_{y}}}{{{v}_{x}}}=\frac{velocity\text{ }along\text{ }y\text{ }axis}{velocity\text{ }along\text{ }x\text{ }axis}$
f) Net velocity is always along the tangent.
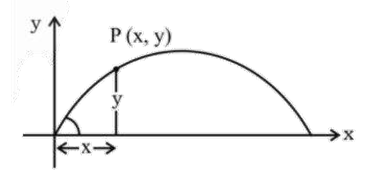
3.2 Equation of trajectory:
Trajectory refers to the path traced by the body. To determine the trajectory, we should find the relation between y and x by eliminating time.
$$
(i) This is the equation of a parabola.
(ii) Because the coefficient of ${{x}_{2}}$ is negative, it is an inverted parabola.
The path of the projectile is a parabola.
$R=\frac{2{{u}^{2}}\sin \theta \cos \theta }{g}$
$\Rightarrow \frac{2{{u}^{2}}}{g}=\frac{R}{\sin \theta cos\theta }$
Substituting this value in the above equation, we have,
$\Rightarrow $
4. RELATIVE MOTION:
Relativity is a very common term. In physics, we use relativity very often.
For example, consider a moving car and yourself (observer) as shown below.
Case I: If you are observing a car moving on a straight road, then you say that the velocity of the car is 20m/s; which means that the velocity of the car relative to you is 20m/s; or, the velocity of the car relative to the ground is 20m/s (as you are standing on the ground.
Case II: If you go inside this car and observe, you will find that the car is at rest while the road is moving backwards. Then, you would say, the velocity of the car relative to the car is 0m/s.
Mathematically, the velocity of B relative to A is represented as
${{\vec{v}}_{BA}}={{\vec{v}}_{B}}-{{\vec{v}}_{A}}$
This, being a vector quantity, direction is very important.
$\therefore \,\,{{\vec{v}}_{BA}}\ne {{\vec{v}}_{AB}}$
5. RIVERBOAT PROBLEMS:
In riverboat problems, we come across the following three terms:
${{\vec{v}}_{r}}=$ absolute velocity of river.
${{\vec{v}}_{br}}=$ velocity of a boatman with respect to river or velocity of a boatman in still water, and
${{\vec{v}}_{b}}=$ absolute velocity of boatman.
Clearly, it is important to note that ${{\vec{v}}_{br}}$ is the velocity of a boatman with which he steers and ${{\vec{v}}_{b}}$ is the actual velocity of boatman relative to ground. Further,
${{\vec{v}}_{b}}={{\vec{v}}_{br}}+{{\vec{v}}_{r}}$
Now, let us derive a few standard results and their special cases.
A boatman starts from point A on one bank of a river with velocity ${{\vec{v}}_{br}}$ in the direction shown in the figure. The river is flowing along positive x-direction with velocity ${{\vec{v}}_{r}}$. The width of the river is ‘d’. Then,
${{\vec{v}}_{b}}={{\vec{v}}_{br}}+{{\vec{v}}_{r}}$
Therefore,
${{v}_{bx}}={{v}_{rx}}+{{v}_{brx}}={{v}_{r}}-{{v}_{br}}\sin \theta $
And
${{v}_{by}}={{v}_{by}}+{{v}_{bry}}=0+{{v}_{br}}\cos \theta ={{v}_{br}}\cos \theta $

Now, the time taken by the boatman to cross the river is given by,
$t=\frac{d}{{{v}_{by}}}=\frac{d}{{{v}_{br}}\cos \theta }\,$
$\Rightarrow t=\frac{d}{{{v}_{br}}\cos \theta }\,\,\,$…(1)
Further, displacement along the x-axis, when he reaches on the other bank (also called as drift), is given by,
$x={{v}_{bx}}t=\left( {{v}_{r}}-{{v}_{br}}\sin \theta \right)\frac{d}{{{v}_{br}}\cos \theta }$
\[\Rightarrow x=\left( {{v}_{r}}-{{v}_{br}}\sin \theta \right)\frac{d}{{{v}_{br}}\cos \theta }\]…(2)
Condition when the boatman crosses the river in the shortest interval of time:
From (1), it can be seen that time (t) will be minimum when $\theta =\text{ }0{}^\circ $ i.e., the boatman should steer his boat perpendicular to the river current.
Condition when the boat wants to reach point B, i.e., at a point just opposite from where he started (shortest distance):
In this case, the drift (x) should be zero.
$\Rightarrow x=0$
$\Rightarrow \left( {{v}_{r}}-{{v}_{br}}\sin \theta \right)\frac{d}{{{v}_{br}}\cos \theta }=0$
$\Rightarrow {{v}_{r}}={{v}_{br}}\sin \theta $
$\Rightarrow \sin \theta =\frac{{{v}_{r}}}{{{v}_{br}}}\,$
$\Rightarrow \theta ={{\sin }^{-1}}\left( \frac{{{v}_{r}}}{{{v}_{br}}} \right)$
Clearly, to reach point B, the boatman should row at an angle $\theta ={{\sin }^{-1}}\left( \frac{{{v}_{r}}}{{{v}_{br}}} \right)$ upstream from AB.
Now, time is given by,
$t=\frac{d}{{{v}_{b}}}=\frac{d}{\sqrt{{{v}_{br}}^{2}-{{v}_{r}}^{2}}}$
As $\sin \theta $ is not greater than 1 and when \[{{v}_{r}}\ge {{v}_{br}}\], then the boatman can never reach at point B.
Because, when \[{{v}_{r}}=\text{ }{{v}_{br}}\], \[\sin \theta ~=1\] or $\sin \theta =90{}^\circ $ and it is just impossible to reach at B if $\theta =90{}^\circ $.
Similarly, when \[{{v}_{r}}>{{v}_{br}}\], \[sin\theta ~>1\], i.e., no such angle exists. Practically, it can be realized in this manner that it is not possible to reach at B if the river velocity (${{v}_{r}}$) is too high.
6. RELATIVE VELOCITY OF RAIN WITH RESPECT TO A MOVING MAN:
Consider a man walking west with velocity ${{\vec{v}}_{m}}$, represented by OA. Let the rain be fall vertically downwards with velocity ${{\vec{v}}_{r}}$, represented by OB, as shown in the following figure. To find the relative velocity of rain with respect to man (i.e.,${{\vec{v}}_{rm}}$) assume the man to be at rest by imposing a velocity $-{{\vec{v}}_{m}}$ on the man and apply this velocity on rain also. Now, the relative velocity of rain with respect to man would be the resultant velocity of ${{\vec{v}}_{r}}(=\overrightarrow{OB})$ and $-{{\vec{v}}_{m}}\left( =\overrightarrow{OC} \right)$, which would be represented by the diagonal OD of rectangle OBDC.
$\Rightarrow {{v}_{rm}}=\sqrt{{{v}_{r}}^{2}+{{v}_{m}}^{2}+2{{v}_{r}}{{v}_{m}}\cos {{90}^{\circ }}}=\sqrt{{{v}_{r}}^{2}+{{v}_{m}}^{2}}$
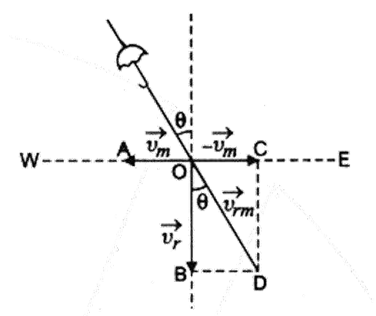
If $\theta $is the angle which ${{v}_{rm}}$makes with the vertical direction, then
$\tan \theta =\frac{BD}{OB}=\frac{{{v}_{m}}}{{{v}_{r}}}$
$\Rightarrow \theta ={{\tan }^{-1}}\left( \frac{{{v}_{m}}}{{{v}_{r}}} \right)$
Here, angle $\theta $ is from the vertical towards the west and is written as $\theta $, west of vertical.
Note: In the above problem, if the man wants to protect himself from the rain, he should hold his umbrella in the direction of their relative velocity of rain concerning man. i.e., the umbrella must be held making an angle \[~\left( \theta =ta{{n}^{1}}\left( \frac{{{v}_{m}}}{{{v}_{r}}} \right) \right)\], west of the vertical.
Besides textbooks, you can also download Motion in a Plane Class 11 Notes PDF which comes entirely free of cost. Drafted in a PDF format, you can easily avail the same from Vedantu’s website. Save the file at a location as per your convenience; it can be on your desktop, laptop or tab and study it anytime anywhere.
Notes of Physics Class 11 Chapter 3: Important Discussions
Motion in a Plane comprises some important topics which are discussed below, students might take a note of these topics:
Introduction to Plane Motion
The very first section of Class 11 Physics Notes Chapter 3 deals with the meanings of velocity, acceleration and magnitude. Know about the various terms and their definitions in Physics by studying the Motion in a Plane Class 11 Notes.
Motion in a Plane
Here, students will get to know about different motions in a plane like circular motion, projectile motion, etc. Besides, the application of motion in a straight line’s equations are applied in x and y directions to find out the motion in a plane’s equations are also described in Motion in a Plane Class 11 Notes.
Projectile Motion
By studying from Physics Ch 3 Class 11 Notes, you will get a clear idea about projectile motion (a special type of motion in a plane). Various projectile motion examples are also provided in the Motion in a Plane Class 11 Notes.
Scalars and Vectors
Along with the definitions of scalar and vector quantities, this section of Physics Class 11 Notes discusses the differences and characteristics between the two. Furthermore, explanations of unit vectors, equal vectors, zero vectors, negative of a vector, parallel vectors, displacement vectors and coplanar vectors are also given in Motion in a Plane Class 11 Notes.
Resolution of Vectors, and Addition and Subtraction of Vectors
In this section of Class 11 Physics Notes Chapter 3, students will be enlightened how a vector can be resolved and what is the process of resolution all about. Specifically in the world of Physics, vectors are resolved as per x, y and z coordinates. Next comes the techniques of addition and subtraction of vectors. Both geometrical and analytical methods are discussed in detail in Motion in a Plane Class 11 Notes, assisting you to have a proper grasp of the same.
2D Relative Velocity
This section in Chapter 3 Physics Class 11 Notes starts with the explanation of relative motion velocity. Following this you will get to study 2D relative motion velocity in the Motion in a Plane Class 11 Notes, which is elucidated with a precise and straightforward derivation.
Uniform Circular Motion
The final section of Motion in a Plane Class 11 Notes focuses on uniform circular motion along with the descriptions of variables used in the same, for instance, angular displacement, angular acceleration, angular velocity and centripetal acceleration. Later in this segment of Class 11th Physics Chapter 3 Notes, more about projectile motion is elaborated comprising 2D projectiles, essential pointers of projectile motion, etc.
You must note that each section is provided with solved numericals based on individual concepts. Practise them thoroughly to obtain full marks. So, without wasting much time, get the Vedantu app on your mobile phone and download the notes of Physics Class 11 Chapter 3 today!
Motion in a Plane Class 11 Notes Physics - Basic Subjective Questions
Section – A (1 Mark Questions)
1. What is the angle between $\vec{A}\times \vec{B}$ and $\vec{B}\times \vec{A}$ ?
Ans. The given vectors act along two parallel lines in opposite directions i.e. they are anti-parallel, so the angle between them is $180^{\circ}$.
2. What is the minimum number of coplanar vectors of different magnitudes which can give zero resultant?
Ans. Three.
If three vectors can be represented completely by the three sides of a triangle taken in the same order, then their resultant is zero.
3. What is the direction of centripetal force when a particle is following a circular path?
Ans. The direction of the centripetal force is towards the centre of the circle.
4. A gunman always keeps his gun slightly tilted above the line of sight while shooting. Why?
Ans. Because bullets follow parabolic trajectory under constant downward acceleration.
5. Define angular displacement.
Ans. The angle rotated by a position vector of the moving particle in a given time interval with some reference line is called its angular displacement.
Section – B (2 Marks Questions)
6. A body is projected so that it has maximum range R. What is the maximum height reached during the flight?
Ans. Maximum height is $\dfrac{1}{4}$ of maximum range i.e. $h=\dfrac{R}{4}$ .
7. (a) Give an example of a body moving with uniform speed but having a variable velocity and an acceleration that remains constant in magnitude but changes in direction.
(b) What is the direction of a centripetal acceleration with reference to the position vector of a particle moving in a circular path?
Ans.
(a) A body having uniform circular motion.
(b) The centripetal acceleration vector points toward the centre of the circular path of motion and is an acceleration in the radial direction.
8. A body moves from one corner of an equilateral triangle of 10 cm to the same corner along the sides. Then, find the distance and displacement, respectively.
Ans. Referring the given diagram, we can say that,

Body moved from $A\rightarrow B\rightarrow C\rightarrow A$
Hence, total distance = 10 + 10 + 10 = 30 cm
But, total displacement is the shortest distance between starting and ending points, i.e., $\Rightarrow 0$.
9. If an object changes its position from point P(5,4,6) to point Q(3,7,9). Calculate the displacement vector and its magnitude.
Ans. P(5,4,6) and Q(3,7,9)
Hence, displacement vector.
$\vec{r}=\vec{\vec{P}}\vec{\vec{Q}}=(3-5)\hat{i}+(7-4)\hat{j}+(9-6)\hat{k}$
$\Rightarrow \vec{r}=-2\hat{i}+3\hat{j}+3\hat{k}$
Magnitude of displacement $=r=\sqrt{(-2)^{2}+3^{2}+3^{2}}$
$\Rightarrow r=\sqrt{22}$
10. A train of length 200 m travelling at $30ms^{-1}$ overtakes another train of length 300 m travelling at $20ms^{-1}$ Find the time taken by the first train to pass the second.
Ans. The relative velocity of the faster train with respect to the slower train is 10 m/s. For overtaking the train's relative distance to be covered is 200+300=500 So, the time taken is 50 sec.
Important Topics of Class 11 Physics Chapter 3 Motion in a Plane
Importance of Physics Class 11 Physics Chapter 3 Motion in a Plane Revision Notes
Class 11 Physics Chapter 3 Notes break down difficult concepts into simpler terms, making it easier for students to grasp the key ideas and principles involved in motion in two dimensions.
These notes are designed to provide concise explanations, along with guided solutions for common problems. This makes it easier to review and understand how to approach different types of questions.
The notes highlight essential formulas and concepts, allowing students to quickly reference and memorise important equations, which are crucial for solving problems efficiently during exams.
By summarising the most important points, the notes allow students to revise effectively in a short amount of time, helping them focus on the core topics without feeling overwhelmed.
Class 11 Physics Chapter 3 Notes cover all major topics related to motion in a plane, ensuring that students have a strong foundation in these areas, which boosts their confidence and preparedness for exams.
Tips for Learning the Class 11 Chapter 3 Physics Motion in a Plane
Focus on mastering vectors, as they are fundamental to this chapter. Learn how to add, subtract, and resolve vectors into components.
Get comfortable with displacement-time, velocity-time, and acceleration-time graphs. These help in visualising motion and solving problems.
Spend time-solving various projectile motion problems. Understanding the horizontal and vertical components of motion is key.
Memorise important formulas for velocity, acceleration, and projectile motion. Knowing these will help you solve questions faster and more accurately.
Draw diagrams for each problem. This will help you understand the direction and magnitude of forces and velocities involved in two-dimensional motion.
Regularly revise key concepts like circular motion, projectile motion, and vector addition to ensure you're well-prepared.
Practice with past exam papers to get familiar with the types of questions and improve your problem-solving speed.
Conclusion
The Class 11 Chapter 3 Physics Motion in a Plane revision notes provide a solid foundation for understanding two-dimensional motion. These notes simplify complex topics like vectors, projectile motion, and circular motion, making it easier for students to grasp the key concepts. With clear explanations, problem-solving techniques, and concise summaries, the notes are an excellent tool for quick revision and exam preparation. By regularly reviewing these notes, students can strengthen their understanding of motion in a plane and feel more confident in applying these concepts during exams.
Other Study Material for CBSE Class 11 Physics Chapter 3
Revision Notes Links for Class 11 Physics:
The chapter-wise notes for Class 11 Physics are given below. Go through these chapter-wise solutions to be thoroughly familiar with the concepts.
Related Important Links for Class 11 Physics

FAQs on Motion In A Plane Class 11 Physics Chapter 3 CBSE Notes - 2025-26
1. What are the main concepts to quickly revise in the Class 11 chapter on Motion in a Plane?
When revising 'Motion in a Plane', focus on these core concepts for a quick summary:
- Scalars and Vectors: The fundamental difference, including definitions of position and displacement vectors.
- Vector Operations: Quick revision of vector addition (Triangle and Parallelogram Laws), subtraction, and resolution of vectors into components.
- Projectile Motion: Key formulas for time of flight, maximum height, and horizontal range.
- Uniform Circular Motion: Concepts of angular velocity, angular acceleration, and centripetal acceleration.
- Relative Velocity: Understanding how to calculate the velocity of one object with respect to another in a 2D plane.
2. What is the key difference between a position vector and a displacement vector?
The key difference lies in their reference point. A position vector specifies an object's location with respect to a fixed origin (e.g., point P is at vector r from the origin). In contrast, a displacement vector represents the change in position. It is a straight line drawn from an object's initial position to its final position, independent of the origin.
3. For revision, why is resolving a vector into its components so important in this chapter?
Resolving a vector into its components is a crucial revision technique because it simplifies complex two-dimensional problems. By breaking a vector (like force or velocity) into two perpendicular components (usually along the x and y-axes), you can treat a single 2D motion problem as two separate and much simpler one-dimensional motion problems. This is the fundamental method used to analyse projectile motion.
4. What physical quantities remain constant during projectile motion, and which ones change?
This is a critical point to remember for exams. During projectile motion (neglecting air resistance):
- Constant Quantities: The horizontal component of velocity (vₓ) remains constant because there is no horizontal acceleration. The acceleration due to gravity (g) is also constant in both magnitude and direction (downwards).
- Changing Quantities: The vertical component of velocity (vᵧ), the overall speed, the direction of motion, and the kinetic and potential energy all change continuously throughout the trajectory.
5. How can I quickly recall the formula for the range of a projectile fired at an angle θ?
To quickly recall the formula for the horizontal range (R), remember it depends on the total time of flight and the constant horizontal velocity. The formula is R = (u² sin(2θ)) / g. A key tip for revision is to remember that the range is maximum when the launch angle θ is 45°, as sin(2θ) becomes sin(90°), which is 1.
6. What is the difference between uniform and non-uniform circular motion?
The key difference is in the speed of the object. In uniform circular motion, the object moves at a constant speed, so its tangential acceleration is zero. However, its velocity is constantly changing direction, so there is a centripetal acceleration. In non-uniform circular motion, the object's speed changes, meaning it has both a centripetal acceleration (to change direction) and a tangential acceleration (to change speed).
7. What is the relationship between linear velocity (v) and angular velocity (ω) in circular motion?
The relationship between linear velocity (v) and angular velocity (ω) for an object moving in a circle of radius (r) is given by the vector equation v = ω × r. For a quick magnitude check during revision, the formula simplifies to v = rω. This shows that the linear speed is directly proportional to both the radius of the circular path and the angular velocity.
8. Why is relative velocity in a plane often handled using vector subtraction?
Relative velocity is handled using vector subtraction because it fundamentally describes the velocity of one object as seen from the perspective of another moving object. The velocity of object B relative to object A (v_BA) is found by subtracting the velocity of the observer (A) from the velocity of the observed object (B). The formula v_BA = v_B - v_A mathematically represents this shift in the frame of reference.
9. How do the concepts from 'Motion in a Straight Line' apply to this chapter?
The concepts from 'Motion in a Straight Line' are the building blocks for 'Motion in a Plane'. The three main equations of motion (v = u + at, s = ut + ½at², and v² = u² + 2as) are applied independently to the horizontal and vertical components of motion. For projectile motion, these equations are used for the vertical motion (with a = g) and simplified for the horizontal motion (with a = 0).